 |
|
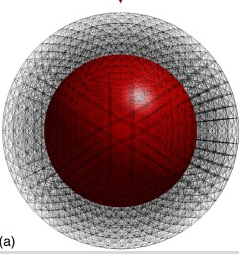
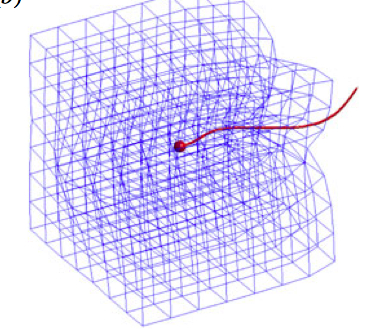
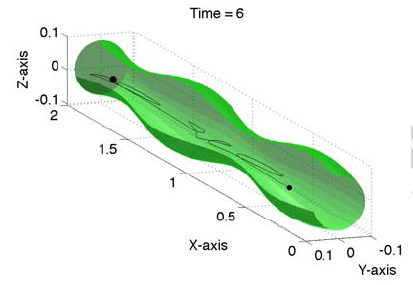
Abstract: The complexity of the mechanics involved in the mammalian reproductive process is evident. Neither an ovum nor an embryo is self-propelled, but move through the oviduct or uterus due to the peristaltic action of the tube walls, imposed pressure gradients, and perhaps ciliary motion. Here we use the method of regularized Stokeslets to model the transport of an ovum or embryo within a peristaltic tube. We represent the ovum or embryo as a spherical vesicle of finite volume - not a massless point particle. The outer membrane of the neutrally-buoyant vesicle is discretized by nodes that are joined by a network of springs. The elastic moduli of these springs are chosen large enough so that a spherical shape is maintained. For simplicity, here we choose an axisymmetric tube where the geometry of the two-dimensional cross-section along the tube axis reflects that of the sagittal cross-section of the uterine cavity. Although the tube motion is axisymmetric, the presence of the vesicle within the tube requires a fully three-dimensional model. As was found in Yaniv et al., 2009 and Yaniv et al., 2012 for a 2D closed channel, we find that the flow dynamics in a 3D peristaltic tube are strongly influenced by the closed end and the manner in which the peristaltic wave damps out towards the closure. In addition, we demonstrate that the trajectory of a vesicle of finite volume can greatly differ from the trajectory of a massless fluid particle initially placed at the vesicle's centroid. |
|
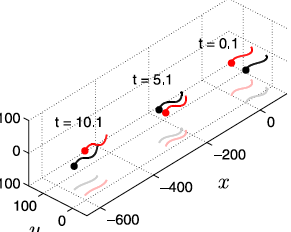
Abstract: In many animals,sperm flagella exhibit primarily planar waveforms. An isolated sperm with a planar flagellar beat in a three-dimensional unbounded fluid domain would remain in a plane. However, because sperm must navigate through complex,three-dimensional confined spaces along with other sperm, forces that bend or move the flagellum out of its current beat plane develop. Here we present an extension of previous models of an elastic sperm flagellar filament whose shape change is driven by the pursuit of a preferred curvature wave. In particular,we extend the energy of the generalized elastica to include a term that penalizes out-of-plane motion. We are now able to study the interaction of free- swimmers in a 3D Stokes flow that do not start out beating in the same plane. We demonstrate the three-dimensional nature of swimming behavior as neighboring sperm swim close to each other and affect each others' trajectories via fluid-structure coupling. |
|
Abstract: Animals move through their environments using muscles to produce force. When an animal's nervous system activates a muscle, the muscle produces different amounts of force depending on its length, its shortening velocity, and its time history of force production. These muscle forces interact with forces from passive tissue properties and forces from the external environment. Using an integrative computational model that couples an elastic, actuated model of an anguilliform, lamprey-like swimmer with a surrounding Navier-Stokes fluid, we study the effects of this coupling between the muscle force and the body motion. Swimmers with different forms of this coupling can achieve similar motions, but use different amounts of energy. The velocity dependence is the most important property of the ones we considered for reducing energy costs and helping to stabilize oscillations. These effects are strongly influenced by how rapidly the muscle deactivates; if force decays too slowly, muscles on opposite sides of the body end up fighting each other, increasing energy cost. Work-dependent deactivation, an effect that causes a muscle to deactivate more rapidly if it has recently produced mechanical work, works together with the velocity dependence to reduce the energy cost of swimming. |
|
Abstract: In this paper we utilize the method of regularized Stokeslets to explore flow fields induced by `carpets' of rotating flagella. We model each flagellum as a rigid, rotating helix attached to a wall, and study flows around both a single helix and a small patch of multiple helices. To test our numerical method and gain intuition about flows induced by a single rotating helix, we first perform a numerical time-reversibility experiment. Next, we investigate the hypothesis put forth in (Darnton et al., Biophys J 86, 1863-1870, 2004) that a small number of rotating flagella could produce "whirlpools" and "rivers" a small distance above them. Using our model system, we are able to produce "whirlpools" and "rivers" when the helices are rotating out of phase. Finally, to better understand the transport of microscale loads by flagellated microorganisms, we model a fully coupled helix-vesicle system by placing a finite-sized vesicle held together by elastic springs in fluid near one or two rotating helices. We compare the trajectories of the vesicle and a tracer particle initially placed at the centroid of vesicle and find that the two trajectories can diverge significantly within a short amount of time. Interestingly, the divergent behavior is extremely sensitive to the initial position within the fluid. |
|
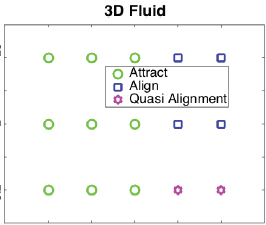
Abstract: The synchronization of nearby sperm flagella as they swim in a viscous fluid was observed nearly a century ago. In the early 1950s, in an effort to shed light on this intriguing phenomenon, G.I. Taylor initiated the mathematical analysis of the fluid dynamics of microorganism motility. Since then, models have investigated sperm hydrodynamics where the flagellum is treated as a waving sheet (2D) or as a slender waving filament (3D). Here we study the interactions of two finite length, flexible filaments confined to a plane in a 3D fluid, and compare these to the interactions of the analogous pair of finite, flexible sheets in a 2D fluid. Within our computational framework using regularized Stokeslets, this comparison is easily achieved by choosing either the 2D or 3D regularized kernel to compute fluid velocities induced by the actuated structures. We find, as expected, that two flagella swimming with a symmetric beatform will synchronize (phase-lock) on a fast time scale and attract towards each other on a longer time scale in both 2D and 3D. For a symmetric beatform, synchronization occurs faster in 2D than 3D for sufficiently stiff swimmers. In 3D, a greater enhancement in efficiency and swimming velocity is observed for attracted swimmers relative to the 2D case. We also demonstrate the tendency of two asymmetrically beating filaments in a 3D fluid to align - in tandem - exhibiting an efficiency boost for the duration of their sustained alignment. |
|
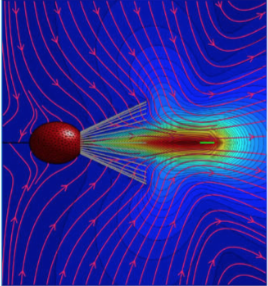
Abstract: The image system for a three-dimensional flow generated by regularized forces outside a solid sphere is formulated and implemented as an extension of the method of regularized Stokeslets. The method is based on replacing a point force given by a delta distribution with a smooth localized function and deriving the exact velocity field produced by the forcing. In order to satisfy zero-flow boundary conditions at a solid sphere, the image system for singular Stokeslets is generalized to give exact cancellation of the regularized flow at the surface of the sphere. The regularized image system contains the same elements as the singular counterpart but with coefficients that depend on a regularization parameter. As this parameter vanishes, the expressions reduce to the image system of the singular Stokeslet. The expression relating force and velocity can be inverted to compute the forces that generate a given velocity boundary condition elsewhere in the flow. We present several examples within the context of biological flows at the microscale in order to validate and highlight the usefulness of the image system in computations. |
|
Abstract: In many physiological settings, microorganisms must swim through viscous fluids with suspended polymeric networks whose length scales are comparable to that of the organism. Here we present a model of a flagellar swimmer moving through a compliant viscoelastic network immersed in a three-dimensional viscous fluid. The swimmer moves with a prescribed gait, exerting forces on the fluid and the heterogeneous network. The viscoelastic structural links of this network are stretched or compressed in response to the fluid flow caused by these forces, and these elastic deformations also generate forces on the viscous fluid. Here we track the swimmer as it leaves a region of Newtonian fluid, enters and moves through a heterogeneous network and finally enters a Newtonian region again. We find that stiffer networks give a boost to the velocity of the swimmer. In addition, we find that the efficiency of swimming is dependent upon the evolution of the compliant network as the swimmer progresses through it. |
|
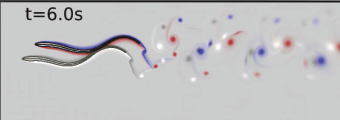
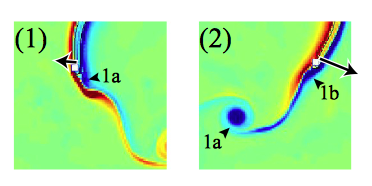
Abstract: In an effort to understand the locomotion dynamics of a simple vertebrate, the lamprey, both physical and computational models have been developed. A key feature of these models is the ability to vary the passive stiffness of portions of the swimmer, focusing on highly flexible models similar in material properties to lampreys and other anguilliform fishes. The physical model is a robotic lamprey-like swimmer that is actuated along most of its length but has passively flexible tails of different stiffnesses. The computational model is a two-dimensional model that captures fluid-structure interactions using an immersed boundary framework. This simulated lamprey is passively flexible throughout its length, and is also actuated along most of its length by the activation of muscle forces. Although the three-dimensional robot and the two-dimensional computational swimmer are such different constructs, we demonstrate that the wake structures generated by these models share many features and examine how flexibility affects these features. Both models produce wakes with two or more same-sign vortices shed each time the tail changes direction (a `2P' or higher-order wake). In general, wakes become less coherent as tail flexibility increases. We examine the pressure distribution near the tail tip and the timing of vortex formation in both cases and find good agreement. Because we include flexibility, we are able to estimate resonant frequencies for several of the robotic and computational swimmers. We find that actuation at the resonant frequency dramatically increases the distance traveled per tail-beat cycle with only a small increase in the lost kinetic energy in the wake, suggesting that the resonant swimmers are more efficient. |
|
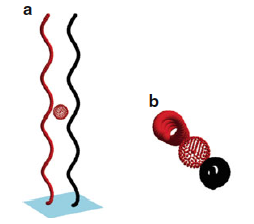
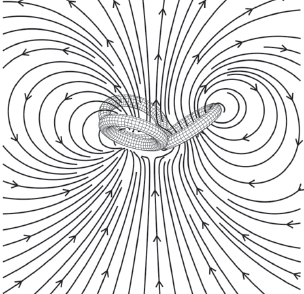
Abstract: A doughnut-shaped object supporting surface rotations was a hypothetical construct proposed by both Taylor and Purcell as a swimmer that would be able to propel itself in a Stokesian fluid because of the irreversibility of its stroke. Here we numerically examine the hydrodynamic interaction of pairs and trios of these free toroidal swimmers. First, we study the axisymmetric case of two toroidal swimmers placed in tandem, and show that a single torus of a corotating pair is more efficient than when it swims alone, but less efficient when paired with a counterrotating partner. Using a regularized Stokeslet framework, we study the nonaxisymmetric case of toroidal swimmers whose axes are initially parallel, but not collinear. These perturbed in tandem swimmers can exhibit qualitatively different trajectories that may, for instance, repel the swimmers or have them settle into a periodic state. We also illustrate interesting dynamics that occur for different initial configurations of three tori. |
|
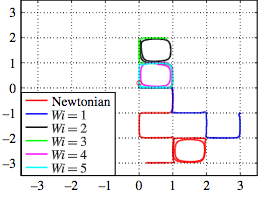
Abstract: We study the dynamics and transport of an elastic fibre in a polymeric cellular flow. The macroscopic fibre is much larger than the infinitesimal immersed polymer coils distributed in the surrounding viscoelastic fluid. Here we consider low-Reynolds- number flow using the Navier-Stokes/Fene-P equations in a two-dimensional, doubly periodic domain. The macroscopic fibre supports both tensile and bending forces, and is fully coupled to the viscoelastic fluid using an immersed boundary framework. We examine the effects of fibre flexibility and polymeric relaxation times on fibre buckling and transport as well as the evolution of polymer stress. Non-dimensional control parameters include the Reynolds number, the Weissenberg number, and the elasto-viscous number of the macroscopic fibre. We find that large polymer stresses occur in the fluid near the ends of the fibre when it is compressed. In addition, we find that viscoelasticity hinders a fibre's ability to traverse multiple cells in the domain. |
|
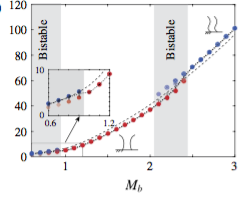
Abstract: Cilia and flagella are essential building blocks for biological fluid transport and locomotion at the micrometre scale. They often beat in synchrony and may transition between different synchronization modes in the same cell type. Here, we investigate the behaviour of elastic microfilaments, protruding from a surface and driven at their base by a configuration-dependent torque. We consider full hydrodynamic interactions among and within filaments and no slip at the surface. Isolated filaments exhibit periodic deformations, with increasing waviness and frequency as the magnitude of the driving torque increases. Two nearby but independently driven filaments synchronize their beating in-phase or anti-phase. This synchrony arises autonomously via the interplay between hydrodynamic coupling and filament elasticity. Importantly, in-phase and anti-phase synchronization modes are bistable and coexist for a range of driving torques and separation distances. These findings are consistent with experimental observations of in-phase and anti-phase synchronization in pairs of cilia and flagella and could have important implications on understanding the biophysical mechanisms underlying transitions between multiple synchronization modes. |
|
Abstract: Here, we study the fluid dynamics of a pair of rigid helices rotating at a constant velocity, tethered at their bases, in a viscous fluid. Our computations use a regularized Stokeslet framework, both with and without a bounding plane, so we are able to discern precisely what flow features are unaccounted for in studies that ignore the surface from which the helices emanate. We examine how the spacing and phase difference between identical rotating helices affects their pumping ability, axial thrust, and power requirements. We also find that optimal mixing of the fluid around two helices is achieved when they rotate in opposite phase, and that the mixing is enhanced as the distance between the helices decreases. |
|
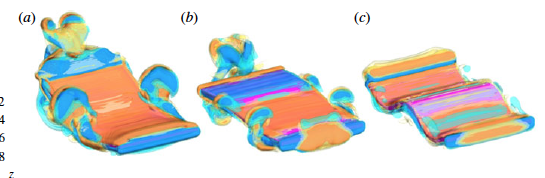
Abstract: Many animals that swim or fly use their body to accelerate the fluid around them, transferring momentum from their flexible bodies and appendages to the surrounding fluid. The kinematics that emerge from this transfer result from the coupling between the fluid and the active and passive material properties of the flexible body or appendages. To elucidate the fundamental features of the elastohydrodynamics of flexible appendages, recent physical experiments have quantified the propulsive performance of flexible panels that are actuated on their leading edge. Here we present a complementary computational study of a three-dimensional flexible panel that is heaved sinusoidally at its leading edge in an incompressible, viscous fluid. These high-fidelity numerical simulations enable us to examine how propulsive performance depends on mechanical resonance, fluid forces, and the emergent panel deformations. Moreover, the computational model does not require the tethering of the panel. We therefore compare the thrust production of tethered panels to the forward swimming speed of the same panels that can move forward freely. Varying both the passive material properties and the heaving frequency of the panel, we find that local peaks in trailing edge amplitude and forward swimming speed coincide and that they are determined by a non-dimensional quantity, the effective flexibility, that arises naturally in the Euler-Bernoulli beam equation. Modal decompositions of panel deflections reveal that the amplitude of each mode is related to the effective flexibility. Panels of different material properties that are actuated so that their effective flexibilities are closely matched have modal contributions that evolve similarly over the phase of the heaving cycle, leading to similar vortex structures in their wakes and comparable thrust forces and swimming speeds. Moreover, local peaks in the swimming speed and trailing edge amplitude correspond to peaks in the contributions of the different modes. This computational study of freely swimming flexible panels gives further insight into the role of resonance in swimming performance that is important in the engineering and design of robotic propulsors. Moreover, we view this reduced model and its comparison to laboratory experiments as a building block and validation for a more comprehensive three-dimensional computational model of an undulatory swimmer that will couple neural activation, muscle mechanics and body elasticity with the surrounding viscous, incompressible fluid. |
|
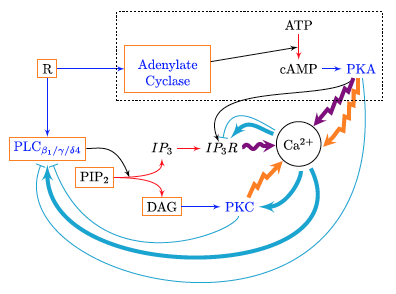
Abstract: The acrosome reaction is a complex, calcium-dependent reaction that results in an exocytotic event required for successful fertilization of the egg. It has long been thought that the acrosome reaction occurs upon sperm binding to the zona pellucida, a viscoelastic layer surrounding the oocyte. Recent studies have suggested that the reaction may even occur before the sperm encounters the zona, perhaps mediated by progesterone or some other agonist. It has been particularly difficult to understand differences between progesterone-induced and zona-induced reactions experimentally and whether one substance is the more biologically relevant trigger. Until this present work, there has been little effort to mathematically model the acrosome reaction in sperm as a whole. Instead, attention has been paid to modeling portions of the pathways involved in other cell types. Here we present a base model for the acrosome reaction which characterizes the known biochemical reactions and behaviors of the system. Our model allows us to analyze several pathways that may act as a stabilizing mechanism for avoiding sustained oscillatory calcium responses often observed in other cell types. Such an oscillatory regime might otherwise prevent acrosomal exocytosis and therefore inhibit fertilization. Results indicate that the acrosome reaction may rely upon multiple redundant mechanisms to avoid entering an oscillatory state and instead maintain a high resting level of calcium, known to be required for successful acrosomal exocytosis and, ultimately, fertilization of the oocyte. |
|
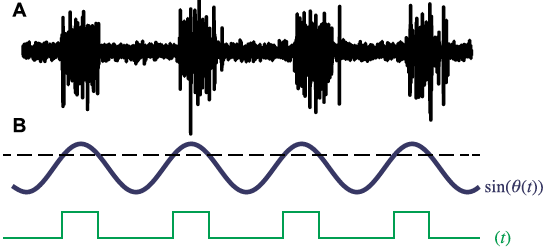
Abstract: Like other animals, lampreys have a central pattern generator (CPG) circuit that activates muscles for locomotion and also adjusts the activity to respond to sensory inputs from the environment. Such a feedback system is crucial for responding appropriately to unexpected perturbations, but it is also active during normal unperturbed steady swimming and influ- ences the baseline swimming pattern. In this study, we investigate different functional forms of body curvature-bas ed sensory feedback and evaluate their effects on steady swimming energetics and kinematics, since little is known experimentally about the functional form of curvature feedback. The distributed CPG is modeled as chains of coupled oscillators. Pairs of phase oscillators represent the left and right sides of segments along the lamprey body. These activate muscles that flex the body and move the lamprey through a fluid environ- ment, which is simulated using a full Navier-Stoke s model. The emergent curvature of the body then serves as an input to the CPG oscillators, closing the loop. We consider two forms of feedback, each consistent with experimental results on lamprey proprioceptive sen- sory receptors. The first, referred to as directional feedback, excites or inhibits the oscillators on the same side, depending on the sign of a chosen gain parameter, and has the opposite effect on oscillators on the opposite side. We find that directional feedback does not affect beat frequency, but does change the duration of muscle activity. The second feedback model, referred to as magnitude feedback, provides a symmetric excitatory or inhibitory effect to oscillators on both sides. This model tends to increase beat frequency and reduces the energetic cost to the lamprey when the gain is high and positive. With both types of feed- back, the body curvature has a similar magnitude. Thus, these results indicate that the same magnitude of curvature-ba sed feedback on the CPG with different functional forms can cause distinct differences in swimming performance. |
|
Abstract: Choanoflagellates, eukaryotes that are important predators on bacteria in aquatic ecosystems, are closely related to animals and are used as a model system to study the evolution of animals from protozoan ancestors. The choanoflagellate Salpingoeca rosetta has a complex life cycle with different morphotypes, some unicellular and some multicellular. Here we use compu- tational fluid dynamics to study the hydrodynamics of swimming and feeding by different unicellular stages of S. rosetta: a swimming cell with a collar of prey-capturing microvilli surrounding a single flagellum, a thecate cell attached to a surface and a dispersal-stage cell with a slender body, long flagellum and short collar. We show that a longer flagellum increases swim- ming speed, longer microvilli reduce speed and cell shape only affects speed when the collar is very short. The flux of prey-carrying water into the collar capture zone is greater for swimming than sessile cells, but this advantage decreases with collar size. Stalk length has little effect on flux for sessile cells. We show that ignoring the collar, as earlier models have done, over- estimates flux and greatly overestimates the benefit to feeding performance of swimming versus being attached, and of a longer stalk for attached cells. |
|
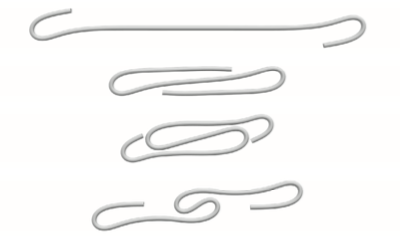
Abstract: Motivated by bacterial transport through porous media, here we study the swimming of an actuated, flexible helical filament in both three-dimensional free space and within a cylindrical tube whose diameter is much smaller than the length of the helix. The filament, at rest, has a native helical shape modeled after the geometry of a typical bacterial flagellar bundle. The finite length filament is a free swimmer and is driven by an applied torque as well as a countertorque (of equal strength and opposite direction) that represents a virtual cell body. We use a regularized Stokeslet framework to examine the shape changes of the flexible filament in response to the actuation as well as the swimming performance as a function of the nondimensional Sperm number that characterizes the elastohydrodynamic system. We also show that a modified Sperm number may be defined to characterize the swimming progression within a tube. Finally, we demonstrate that a helical filament whose axis is not aligned with the tube axis can exhibit centering behavior in the narrowest tubes. |